POSTER MANIFESTO
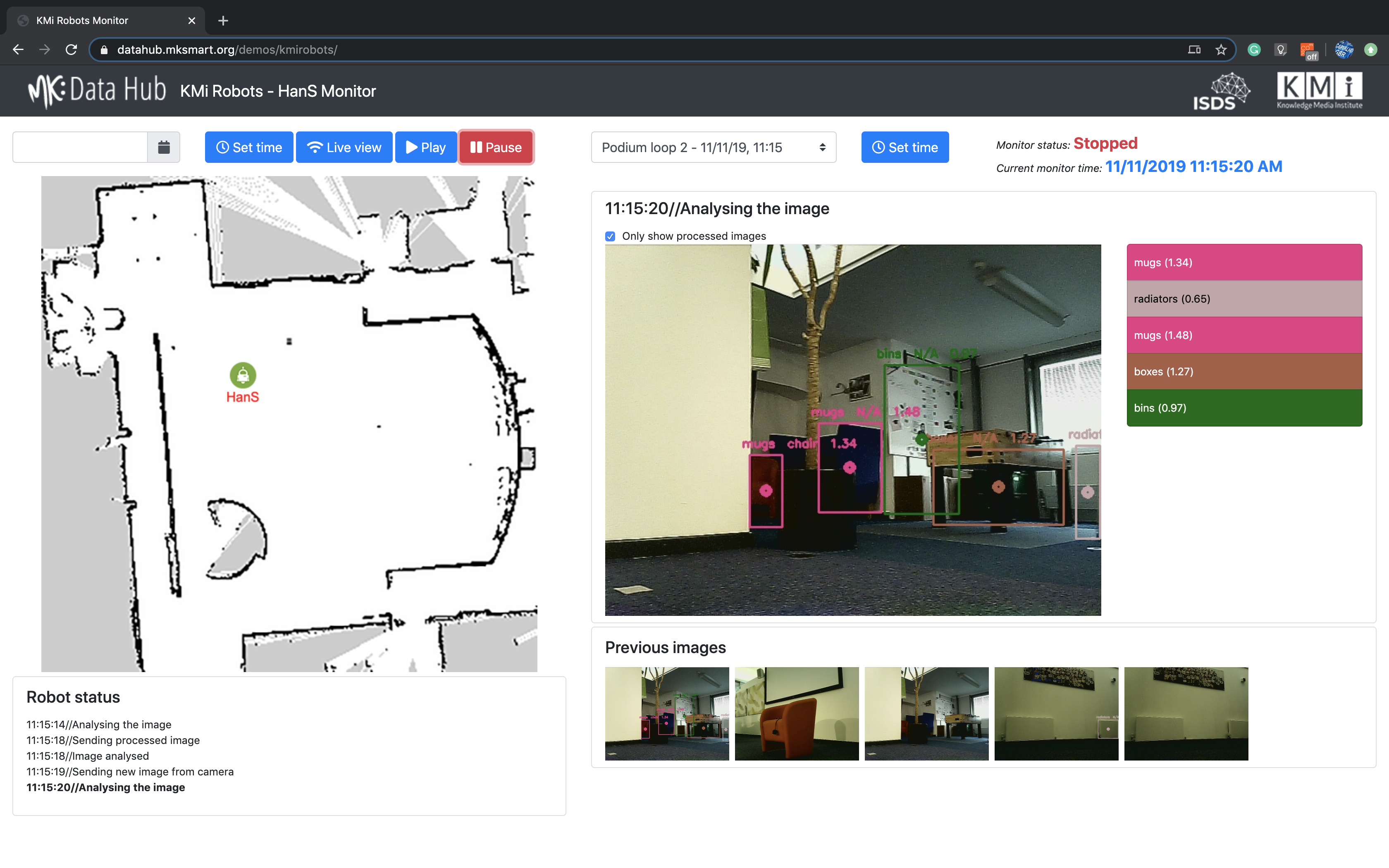
This poster outlines our main research goals, aimed at building "Visually Intelligence Agents". You can click on the thumbnail to take a look at the full-size poster. See also our latest paper, which has been accepted for presentation at KR 2020, for further reference.
Read Paper